

Topology (2nd Edition)
This book is the best introductory book on Topology, an upper undergraduate/graduate course taken in university. I have written a short book review on it.
Excerpt:
Book Review: Topology
Book’s Author: James R. Munkres
Title: Topology
Prentice Hall, Second Edition, 2000
It is often said that one must not judge a book by its cover. The book with a plain cover, simply titled “Topology”, is truly a rare gem and in a class of its own among Topology books.
One striking aspect of the book is that it is almost entirely self-contained. As stated in the preface, there are no formal subject matter prerequisites for studying most of the book. The author begins with a chapter on Set Theory and Logic which covers necessary concepts like DeMorgan’s laws, Countable and Uncountable Sets, and the Axiom of Choice.
The first part of the book is on General Topology. The second part of the book is on Algebraic Topology. The book covers Topological Spaces and Continuous Functions, Connectedness and Compactness, and Separation Axioms. Some other material in the book include the Tychonoff Theorem, Metrization Theorems and Paracompactness, Complete Metric Spaces and Function Spaces, and Baire Spaces and Dimension Theory.
The book defines connectedness as follows: The space  is said to be connected if there does not exist a separation of . (A separation of is defined to be a pair
is said to be connected if there does not exist a separation of . (A separation of is defined to be a pair  ,
,  of disjoint nonempty open subsets of whose union is .) Other sources may define connectedness by, is connected if
of disjoint nonempty open subsets of whose union is .) Other sources may define connectedness by, is connected if  continuous
continuous  .
.
Also, the proof of Urysohn’s Lemma in the book was presented slightly differently from other books as they did not use dyadic rationals to index the family of open sets. Rather, the book lets  be the set of all rational numbers in the interval
be the set of all rational numbers in the interval ![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) , and since is countable, one can use induction to define the open sets
, and since is countable, one can use induction to define the open sets  . In hindsight, the dyadic rationals approach in other sources may be more explicit and clearer.
. In hindsight, the dyadic rationals approach in other sources may be more explicit and clearer.
An interesting new concept mentioned in the book is that of locally connectedness (not to be confused with locally path connectedness). A space is said to be locally connected at  if for every neighborhood of , there is a connected neighborhood of contained in . If is locally connected at each of its points, it is said simply to be locally connected. For example, the subspace
if for every neighborhood of , there is a connected neighborhood of contained in . If is locally connected at each of its points, it is said simply to be locally connected. For example, the subspace ![[-1,0)\cup (0,1]](https://s0.wp.com/latex.php?latex=%5B-1%2C0%29%5Ccup+%280%2C1%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) of
of  is not connected, but it is locally connected. The topologists’ sine curve is connected but not locally connected.
is not connected, but it is locally connected. The topologists’ sine curve is connected but not locally connected.
In general, the content of the book is comprehensive. The other book, “Essential Topology”, did not cover some topics like the Urysohn Lemma, regular spaces and normal spaces.
Approach
The author’s approach is generally to give a short motivation of the concept, followed by definitions and then theorems and proofs. Examples are interspersed in between the text. The motivation tends to be a little bit too short though. For instance, in other books there is some motivation of how balls can determine the metric in a metric space, leading to the concepts of “candidate balls”  . This useful concept is not found in the book Topology, nor the other book Essential Topology.
. This useful concept is not found in the book Topology, nor the other book Essential Topology.
One interesting explanation of the terminology “finer” and “coarser” is found in the book. The idea is that a topological space is like “a truckload full of gravel”‘ — the pebbles and all unions of collections of pebbles being the open sets. If now we smash the pebbles into smaller ones, the collection of open sets has been enlarged, and the topology, like the gravel, is said to have been made finer by the operation.
Another point to note is that the book does not use Category Theory. Personally, I would prefer the Category approach, since it can make proofs neater, and it provides additional insight to the nature of the theorem. We also note that the other book “Essential Topology”, also does not explicitly use Category Theory. But upon closer examination, the book has expressed commutative diagrams in words, which is not as clear as in diagram form.
Organization
The organization of the book is similar to most other books, except that it covers Connectedness and Compactness before the Separation Axioms. The concept of Hausdorff spaces, however, is covered way earlier, immediately after the discussion of closure and interior of a set. This enables theorems like “Every compact subspace of a Hausdorff space is closed” to be proved in the Compactness chapter.
Style
The author’s style is to combine rigor in proofs and definitions, with intuitive ideas in the examples and commentary. This makes it both a good textbook to learn from, and a good reference for proofs too.
This informal style in the commentary makes for a especially good read. For instance, a mathematical riddle is mentioned: “How is a set different from a door?” (For interested readers, the answer can be found on page 93.)
Also, there are many figures in the book, 84 sets of figures to be precise. This is rather good for a math book, and I would recommend the book to visual learners.
However, to learn Topology from this book alone may be difficult. Even though there are exercises to practice, there are no solutions and very few hints. Also, the book uses the terminology “limit point”, which can be confusing.
The book has surprisingly few typographical errors. While reading through the book, I only spotted a trivial one on page 107, where a function written as “ ” should be “
” should be “ ” instead. Upon consulting an errata list, there was only one page of errors.
” instead. Upon consulting an errata list, there was only one page of errors.
Conclusion
In conclusion, despite some shortcomings of the book, Topology is a great book, and if there was one Topology book that I could bring to a desert island, it would be this one.
Chapter Headings
Part I: General Topology
- Set Theory and Logic
- Topological Spaces and Continuous Functions
- Connectedness and Compactness
- Countability and Separation Axioms
- The Tychonoff Theorem
- Metrization Theorems and Paracompactness
- Complete Metric Spaces and Function Spaces
- Baire Spaces and Dimension Theory
Part II: Algebraic Topology
- The Fundamental Group
- Separation Theorems in the Plane
- The Seifert-van Kampen Theorem
- Classification of Surfaces
- Classification of Covering Spaces
- Applications to Group Theory
For more undergraduate Math book recommendations, check out Undergraduate Level Math Book Recommendations.





 be simplicial maps. We say that
be simplicial maps. We say that  (denoted by
(denoted by  ) if there exists a simplicial map
) if there exists a simplicial map  such that
such that  and
and  for all
for all  . If
. If  , we say that
, we say that  if there is a homotopy
if there is a homotopy  for all
for all  ,
,  .
. are said to be matching faces with respect to
are said to be matching faces with respect to  if
if  for
for  and
and  .
. such that
such that  for
for  .
.![\Lambda^i[n]](https://s0.wp.com/latex.php?latex=%5CLambda%5Ei%5Bn%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) as the simplicial subset of
as the simplicial subset of ![\Delta[n]](https://s0.wp.com/latex.php?latex=%5CDelta%5Bn%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) generated by all
generated by all  for
for ![\sigma_n=(0,1,\dots\,n)\in\Delta[n]_n](https://s0.wp.com/latex.php?latex=%5Csigma_n%3D%280%2C1%2C%5Cdots%5C%2Cn%29%5Cin%5CDelta%5Bn%5D_n&bg=ffffff&fg=1a1a1a&s=0&c=20201002) is the nondegenerate element.
is the nondegenerate element.![f:\Lambda^i[n]\to X](https://s0.wp.com/latex.php?latex=f%3A%5CLambda%5Ei%5Bn%5D%5Cto+X&bg=ffffff&fg=1a1a1a&s=0&c=20201002) has an extension for each
has an extension for each  be pointed simplicial sets. The wedge of
be pointed simplicial sets. The wedge of  , is the simplicial set obtained by identifying the basepoint of
, is the simplicial set obtained by identifying the basepoint of 
 consisting of
consisting of  for
for  for
for  .
. is defined to be the simplicial quotient
is defined to be the simplicial quotient  .
. and
and  be simplicial maps. We define
be simplicial maps. We define  to be the push-out in the diagram
to be the push-out in the diagram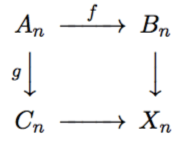
 , where
, where  is the equivalence relation such that
is the equivalence relation such that  for
for  . Then
. Then  with faces and degeneracies induced from that in
with faces and degeneracies induced from that in  and
and  forms a simplicial set with a push-out diagram of simplicial sets
forms a simplicial set with a push-out diagram of simplicial sets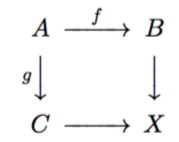
![\partial\Delta[n]=\langle d_i(0,1,\dots,n)\mid 0\leq i\leq n\rangle\subseteq \Delta[n]](https://s0.wp.com/latex.php?latex=%5Cpartial%5CDelta%5Bn%5D%3D%5Clangle+d_i%280%2C1%2C%5Cdots%2Cn%29%5Cmid+0%5Cleq+i%5Cleq+n%5Crangle%5Csubseteq+%5CDelta%5Bn%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) be the simplicial subset of
be the simplicial subset of  -simplex
-simplex  . Then
. Then
![S^n=\Delta[n]/\partial\Delta[n]](https://s0.wp.com/latex.php?latex=S%5En%3D%5CDelta%5Bn%5D%2F%5Cpartial%5CDelta%5Bn%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) .
.

 of an arbitrary collection of path-connected spaces
of an arbitrary collection of path-connected spaces  there are isomorphisms
there are isomorphisms  for all
for all  is the same thing as a collection of maps
is the same thing as a collection of maps  . Taking
. Taking  and
and  gives the result.
gives the result. , which is the result for a product of two spaces. The general result then follows by induction.
, which is the result for a product of two spaces. The general result then follows by induction. ,
, ![\psi([f])=([f_1],[f_2])](https://s0.wp.com/latex.php?latex=%5Cpsi%28%5Bf%5D%29%3D%28%5Bf_1%5D%2C%5Bf_2%5D%29&bg=ffffff&fg=1a1a1a&s=0&c=20201002) .
. ,
,  ,
,  where
where  are the projection maps.
are the projection maps.![\psi ([f]+[g])=\psi([f])+\psi([g])](https://s0.wp.com/latex.php?latex=%5Cpsi+%28%5Bf%5D%2B%5Bg%5D%29%3D%5Cpsi%28%5Bf%5D%29%2B%5Cpsi%28%5Bg%5D%29&bg=ffffff&fg=1a1a1a&s=0&c=20201002) , thus
, thus  is a homomorphism.
is a homomorphism. ,
, ![\phi([g_1],[g_2])=[g]](https://s0.wp.com/latex.php?latex=%5Cphi%28%5Bg_1%5D%2C%5Bg_2%5D%29%3D%5Bg%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) where
where  ,
,  .
. of the space X to serve as a “base point” and consider only those paths that begin and end at
of the space X to serve as a “base point” and consider only those paths that begin and end at  .
. for all
for all  .
. is the trivial group (the group consisting of just the identity). This is because if f is a loop in
is the trivial group (the group consisting of just the identity). This is because if f is a loop in  based at
based at 
![p:[a,b]\to [c.d]](https://s0.wp.com/latex.php?latex=p%3A%5Ba%2Cb%5D%5Cto+%5Bc.d%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) of the form p(x)=mx+k that maps a to c and b to d. This is called the positive linear map of [a,b] to [c,d] because its graph is a straight line with positive slope.
of the form p(x)=mx+k that maps a to c and b to d. This is called the positive linear map of [a,b] to [c,d] because its graph is a straight line with positive slope. in X as follows: On [0,a] it equals the positive linear map of [0,a] to I=[0,1] followed by f; on [a,b] it equals the positive linear map of [a,b] to I followed by g; on [b,1] it equals the positive linear map of [b,1] to I followed by h. This path
in X as follows: On [0,a] it equals the positive linear map of [0,a] to I=[0,1] followed by f; on [a,b] it equals the positive linear map of [a,b] to I followed by g; on [b,1] it equals the positive linear map of [b,1] to I followed by h. This path  is path homotopic to
is path homotopic to  be the map whose graph is pictured in Figure 51.9 (taken from Munkre’s Book)
be the map whose graph is pictured in Figure 51.9 (taken from Munkre’s Book)
 . Let’s see why this is so.
. Let’s see why this is so. is the positive linear map of [0,a] to [0,c], followed by the positive linear map of [0,c] to I, followed by f. This equals the positive linear map of [0,a] to I, followed by f, which is precisely
is the positive linear map of [0,a] to [0,c], followed by the positive linear map of [0,c] to I, followed by f. This equals the positive linear map of [0,a] to I, followed by f, which is precisely  is a path in I from 0 to 1, and so is the identity map
is a path in I from 0 to 1, and so is the identity map  . Since I is convex, there is a path homotopy P in I between p and i. Then,
. Since I is convex, there is a path homotopy P in I between p and i. Then,  is a path homotopy in X between
is a path homotopy in X between  .
. is exactly the triple product
is exactly the triple product  and
and  .
.![(g*h)(s)=\begin{cases} g(2s)\ &\text{for }s\in [0,\frac{1}{2}]\\ h(2s-1)\ &\text{for }s\in [\frac{1}{2},1] \end{cases}](https://s0.wp.com/latex.php?latex=%28g%2Ah%29%28s%29%3D%5Cbegin%7Bcases%7D++++g%282s%29%5C+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B0%2C%5Cfrac%7B1%7D%7B2%7D%5D%5C%5C++++h%282s-1%29%5C+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B%5Cfrac%7B1%7D%7B2%7D%2C1%5D++++%5Cend%7Bcases%7D&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
![f*(g*h)(s)=\begin{cases} f(2s)\ &\text{for }s\in [0,\frac{1}{2}]\\ (g*h)(2s-1)\ &\text{for }s\in [\frac{1}{2},1] \end{cases} =\begin{cases} f(2s)\ &\text{for }s\in [0,\frac{1}{2}]\\ g(4s-2)\ &\text{for }s\in [\frac{1}{2},\frac{3}{4}]\\ h(4s-3) &\text{for }s\in [\frac{3}{4},1] \end{cases}](https://s0.wp.com/latex.php?latex=f%2A%28g%2Ah%29%28s%29%3D%5Cbegin%7Bcases%7D++++f%282s%29%5C+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B0%2C%5Cfrac%7B1%7D%7B2%7D%5D%5C%5C++++%28g%2Ah%29%282s-1%29%5C+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B%5Cfrac%7B1%7D%7B2%7D%2C1%5D++++%5Cend%7Bcases%7D++++%3D%5Cbegin%7Bcases%7D++++f%282s%29%5C+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B0%2C%5Cfrac%7B1%7D%7B2%7D%5D%5C%5C++++g%284s-2%29%5C+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B%5Cfrac%7B1%7D%7B2%7D%2C%5Cfrac%7B3%7D%7B4%7D%5D%5C%5C++++h%284s-3%29+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B%5Cfrac%7B3%7D%7B4%7D%2C1%5D++++%5Cend%7Bcases%7D++++&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
 when c=1/4 and d=1/2. Thus, the these two products are path homotopic, and we have finally proven the associativity of *.
when c=1/4 and d=1/2. Thus, the these two products are path homotopic, and we have finally proven the associativity of *. , and if g is a path in X from
, and if g is a path in X from  , we define the product f*g of f and g to be he path h given by the equations
, we define the product f*g of f and g to be he path h given by the equations![h(s)=\begin{cases}f(2s) &\text{for }s\in [0,\frac{1}{2}], \\ g(2s-1)& \text{for }s\in[\frac{1}{2}, 1]\end{cases}](https://s0.wp.com/latex.php?latex=h%28s%29%3D%5Cbegin%7Bcases%7Df%282s%29+%26%5Ctext%7Bfor+%7Ds%5Cin+%5B0%2C%5Cfrac%7B1%7D%7B2%7D%5D%2C+%5C%5C+g%282s-1%29%26+%5Ctext%7Bfor+%7Ds%5Cin%5B%5Cfrac%7B1%7D%7B2%7D%2C+1%5D%5Cend%7Bcases%7D&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
![[f]*[g]=[f*g]](https://s0.wp.com/latex.php?latex=%5Bf%5D%2A%5Bg%5D%3D%5Bf%2Ag%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
![H(s,t)=\begin{cases}F(2s,t) &\text{for }s\in[0,\frac{1}{2}],\\ G(2s-1,t)&\text{for }s\in[\frac{1}{2},1]\end{cases}](https://s0.wp.com/latex.php?latex=H%28s%2Ct%29%3D%5Cbegin%7Bcases%7DF%282s%2Ct%29+%26%5Ctext%7Bfor+%7Ds%5Cin%5B0%2C%5Cfrac%7B1%7D%7B2%7D%5D%2C%5C%5C+G%282s-1%2Ct%29%26%5Ctext%7Bfor+%7Ds%5Cin%5B%5Cfrac%7B1%7D%7B2%7D%2C1%5D%5Cend%7Bcases%7D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) .
.