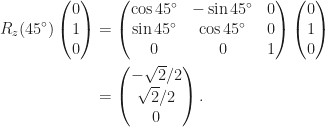
3D Rotation Matrices and Examples The following rotation matrices rotate vectors by an angle in an anticlockwise direction about the -, -, or -axis respectively (the rotated axis points towards the observer). Example 1 Rotating anticlockwise about -axis: Example 2 Rotating anticlockwise about -axis: Share this: Share on X (Opens in new window) X Share on Facebook (Opens in new window) Facebook More Share on LinkedIn (Opens in new window) LinkedIn Share on Reddit (Opens in new window) Reddit Share on Tumblr (Opens in new window) Tumblr Share on Pinterest (Opens in new window) Pinterest Email a link to a friend (Opens in new window) Email Print (Opens in new window) Print Like Loading... Related Author: mathtuition88 Math and Education Blog View all posts by mathtuition88











Reblogged this on Project ENGAGE.
LikeLike